
The topic of discussion in this article is “Trigonometric Identities”. We can dissect the terminology into two words i.e., “Trigonometric” and “Identities”. Let us look at them individually one by one.
The word “Trigonometric” comes from the word Trigonometry (Greek trigonon: triangle and metron: to measure). Therefore, the literal meaning of the word “Trigonometric” is “(an entity) related to the measure of a triangle”.
In mathematics, the term “Identity” means a relation that always holds true (within some or no constraints). For example, the equation, x + 1/2 = (2x+1)/2 represents an identity. An identity can be as simple as x = x . Well-known identities also have unique names. Some of the identities are simply named after the mathematicians who made significant contributions in the development of those identities. For instance, there is a famous Euler’s identity that relates two popular constants (‘e’ and ‘π’) and an imaginary unit. The Euler’s identity is written as:

Or

Can you come up with your self-defined identities? You can also name the identities (that you define) as you like. As a matter of fact, some famous identities also have multiple names.
Combining the two terms “Trigonometric” and “Identities”, we get “Trigonometric identities” which translates to the “identities related to the measure of a triangle”. It is very important to note that the literal meaning can be a little misleading. Although the literal meaning of “trigonometry” means “measure of triangle”, but “trigonometric identities” are used to deal with identities related to only Right-Angled Triangles. The identities dealing with all triangles, in general, are called the Triangle Identities.
Therefore, to understand (and possibly derive) the trigonometric identities, we need a right-angled triangle.
Right angled triangle or Right triangle

Right angled triangle is a triangle with one of the three inner angles equal to 900. You may recall that the sum of all inner angles of a triangle is equal to 1800. Therefore, if we name the two angles (other than 900) as θ and ϕ, then the following relation holds.
Θ + ϕ + 900 = 1800
Θ + ϕ = 900
In other words, the sum of other two angles equate to 900, therefore, individually both θ and ϕ are less than 900.
There are some terminologies that we define for the angle (θ or ϕ) under consideration.
Hypotenuse: The side opposite to the right angle is called Hypotenuse. The hypotenuse is, in fact, the longest of all three sides of a right triangle.
Perpendicular/Opposite: The side opposite to the angle under consideration (let us say θ in the above figure) is called the Perpendicular or Opposite for that angle.
Base/Adjacent: The side adjacent to the angle under consideration (θ in the above figure) is called the Base or Adjacent for that angle.
Pythagoras Theorem
We can label the three sides of a right-angled triangle with different symbols. We will represent the hypotenuse with the letter ‘a’, perpendicular with the letter ‘b’ and the base with the letter ‘c’. Using the letters, we can represent one of the most popular theorems in mathematics called the Pythagoras theorem. It is represented as:
a2 = b2 + c2
The above relation states that the square of the magnitude of the longest side of a right triangle is equal to the sum of squares of the magnitudes of the smaller sides of that right triangle.
For example, suppose a right triangle is given with the length of the longest side being equal to 10 units. It is also known that the other two sides have same length. We are required to find the perimeter (the total length of the boundary of the right triangle). To find the perimeter of the triangle we must know the length of all three sides. The length of hypotenuse ‘a’ (the longest side), is given i.e., 10 units, and we also know that other two sides are equal i.e., b = c. By applying the Pythagoras Theorem, we have a2 = b2 + c2 = b2 + b2 = 2b2. From this relation, we find the length of one of the sides as 
Exercise: Find the unknown angle of a right triangle given that one of them is equal to 600. It is also known that length of the hypotenuse is 20 units and length of one of the sides is 10 units. Find the unknown length of the third side.
Trigonometric functions
You can realize that the angles of a right triangle are related with the length of the sides. Imagine a right triangle with an inner angle θ. If the angle is altered then you may realize that the side lengths also vary in length. But exactly how and in what way they are related? Trigonometric functions have been defined for this purpose. They are in essence only the ratios of the lengths of the sides. The three basic trigonometric functions that are widely used in mathematics, engineering and physics are,



You may remember them using the famous “Some People Have, Curly Brown Hair, Through Proper Brushing”. The other three trigonometric functions that are derived from the above relations are:



Trigonometric identities basically deal with the trigonometric functions. Now get ready as we are going to derive our first trigonometric identity. If we take the ratio of sine θ and cos θ, we get our first trigonometric identity.


So, basically tan θ is a ratio between sin θ and cos θ. Using the above relations, we can derive more trigonometric identities as:



Exercise: As an exercise, find the trigonometric identity that relates the cot θ with the sine and cosine of θ.
Pythagorean Trigonometric Identity
We know the Pythagoras theorem that relates the length of three sides of a right triangle. We also have gone through the famous trigonometric functions that relate the angle of a right triangle with the length of its sides. Now let us play around and relate the two to derive some exciting Pythagorean Trigonometric Identities.
Let us write the trigonometric functions in the form of ‘a’ (Hypotenuse), ‘b’ (Perpendicular) and ‘c’ (Base). Remember that the perpendicular and base are defined with respect to the angle in consideration. Change the angle of consideration, the perpendicular and base will change accordingly. Hypotenuse remains the same, however. The trigonometric functions for the angle θ can be thus written as:


Rearranging the above relations yields,


After plugging in the above in the Pythagoras theorem, we get,


To satisfy the above relation, the following identity must hold.

Congratulations! we just derived the trigonometric identity which is widely used while solving complex problems that involve trigonometric functions. Take a moment and appreciate the elegance of the equation. It is fascinating to note that the sum of squares of sine and cosine of an angle is always a constant!
Interestingly, we can further manipulate the above identity by dividing it by cos2θ on both sides. This will result in another trigonometric identity.



Exercise: As an exercise derive the following trigonometric identity. You can use any of the aforementioned trigonometric identities.

Trigonometric identities for opposite angles
You may recall that for the angle θ in four different quadrants I, II, III and IV, the trigonometric functions are either positive or negative. It can be summarized below.
- In Quadrant-I (0 < θ < 900), the three trigonometric functions i.e., sin θ, cos θ and tan θ, all are positive.
- In Quadrant-II (900 < θ < 1800), only sin θ is positive whereas cos θ and tan θ are negative.
- In Quadrant-III (1800 < θ < 2700), only tan θ is positive whereas sin θ and cos θ are negative.
- In Quadrant-IV (2700 < θ < 3600), only cos θ is positive whereas sin θ and tan θ are negative.
This can be remembered using the combination “ASTC” i.e., All positive (in Quadrant-I), only Sine positive (in Quadrant-II), only Tangent positive (in Quadrant-III) and finally only Cosine positive (in Quadrant-IV).
Note that the angle θ is measured from the positive x-axis in the counter-clockwise direction. Therefore, the angle – θ would be measured as an angle from the positive x-axis but in the opposite direction i.e., clockwise direction.
Therefore, if θ is in Quadrant-I then – θ will be in Quadrant-IV. Similarly, if θ is in Quadrant-II, then – θ will be in Quadrant-III. If θ is in Quadrant-III, then – θ will be in Quadrant-II and finally, if θ is in Quadrant-IV, then – θ will be in Quadrant-I.
The angles ‘θ’ and ‘– θ’ are called opposite angles.
Keeping the discussion above in mind we can realize that following opposite-angle identities hold.



Let us explain one of them (the identity sin (-θ) = -sin θ). Sine of an angle is positive if it is in quadrant-I, but its opposite angle will then be in quadrant-IV where sine is negative therefore, sin(-θ) = – sin θ (for θ in quadrant-I). Similar argument can be given for remaining three quadrants to complete the proof.
You should revisit the arguments made above to satisfy yourself that the opposite angle identities actually hold true. To remember these identities just keep in mind that “only cosine eats away the negative sign”.
Angle Sum and Difference Identities
What if we were to evaluate the trigonometric function written in a form something like ? Can we somehow convert them into individual sines and/or cosines of the angles? Worry not, because we have got the following identities:








The above-mentioned identities are not easy to remember but they are worth remembering as they are often utilized. Note that the α and β are two arbitrary angles.
Let us solve a numerical example so that we may know how to apply the aforementioned relations. We are given sin 200 = 0.342, sin 250 = 0.4226, cos 200 = 0.9397 and cos 250 = 0.906. It is asked to find the magnitudes of sin 450, sin 50, cos 450 and cos 50 (with the help of given information). To solve this problem, we say that α = 200 and β = 250. Now using the angle sum and difference identities, it can be realized that,
sin 450 = sin (200 + 250) = sin 200cos 250 + cos 200sin 250
Plugging in the given values we have,
sin 450 = (0.342)(0.906) + (0.9397)(0.4226) = 0.707
Similarly, we have,
sin 50 = sin (250 – 200) = -sin (200 – 250)
sin 50 = -{sin 200 cos 250 – sin 250 cos 200} = 0.0871
In this way, magnitudes of cos 450 and cos 50 can be figured out. You might be thinking that we could have just used a calculator without going through all this hassle. Note that the purpose of this example is to show the concerned trigonometric identities in action. The applications of these identities are widespread.
Double angle identities
Let us utilize the angle sum and difference identities to derive the special double angle identities. Have you realized what if both α and β (in angle sum identities) are equal i.e., α = β = θ? Let us see what happens when we put both α and β equal to θ in angle sum identities.


Similarly, using the angle sum identity for cosine.



Also, using the angle sum identity for tangent.


You do not have to worry about memorising each and every one of these identities. Observe that you only need to remember the angle sum and difference identities and with help of few manipulations, you will be able to derive other identities.
Exercise: Using the above-mentioned identities that we have studied so far, try to prove that following identities hold. (Hint: You will probably need the Pythagorean Trigonometric Identities).



You might be now able to realize how useful these identities could be. Trigonometric identities make the algebraic manipulation really easy to perform. As you explore different areas of science and engineering, you will better get to know the true power of the trigonometric identities.
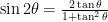
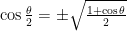
Half angle Identities
They are not difficult to derive. In fact, by simply manipulating the identities that we have discussed before, we can prove that following identities are true.
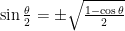

To see how they are derived, let us jump into the process and try it out ourselves. If we look at the equation for sin θ/2, what can we make out of it? Do we have any lead? How do we start deriving the identity? Questions like that come to mind and there is nothing to be ashamed of if you are puzzled and cannot find how to tackle such situations. Even the great mathematicians face similar conditions while they solve a problem. Mathematicians have the habit of continuously playing around with the equations and make mistakes. We are going to do the same.
Observe the equation involving the sin (θ/2) again. We observe a big square root there. Let us get rid of it first by taking square on both sides. This results in the following.

We see a half-angle also. Should we get rid of it? Let us see how to do it. The angle θ/2 can be replaced by another angle, say α (θ/2 is, in essence, also an angle that is half of the angle θ). Thus, θ = 2α. By making the substitutions, we get

Looks familiar? After further manipulation, we get the following relation.

And now we recognize that this comes from the double angle identity. Therefore, the half-angle identity can be derived from the double angle identity (the tricky part is the substitution of 2α = θ).
In mathematics, this is a common practice to play around with the equations and vigilantly observing how everything works out. With practice, it will be a piece of cake to derive all the trigonometric identities we have studied so far.
Exercise: As an exercise, prove that the following identities are true.




Periodicity identities
Trigonometric functions are periodic i.e., their values start repeating after a certain angle known as the period of the respective function. The period of sin θ and cos θ is 2π radians, whereas the period of tan θ is only π radians. Based on these facts, we can write the periodicity identities as:



Where n = 1, 2, 3, 4 … Be careful about the difference between radians and degrees. 2π radians equal to 3600. While evaluating the values of the trigonometric functions using the calculator, make sure that the calculator is set to the correct mode i.e., degree or radian.
Sources:
- https://en.wikipedia.org/wiki/List_of_trigonometric_identities
- https://www.mathsisfun.com/algebra/trigonometric-identities.html
- https://www2.clarku.edu/faculty/djoyce/trig/identities.html
- https://www.purplemath.com/modules/idents.htm
- http://www.sosmath.com/trig/Trig5/trig5/trig5.html
- https://www.khanacademy.org/math/trigonometry/trig-equations-and-identities
- https://byjus.com/maths/trigonometric-identities/